AR Tracking Chassis
- yingnan4
- 2022年9月11日
- 讀畢需時 2 分鐘
已更新:2022年9月13日
Calculate transformations with new node using kown TF tree
Review transformation between 2 frames:
rosrun tf tf_echo ar_marker_153 base_footprint
Useful Script:
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv){
ros::init(argc, argv, "my_tf_listener");
ros::NodeHandle node;
ros::service::waitForService("spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("spawn");
//turtlesim提供/spawn服务
turtlesim::Spawn srv;
//通过call函数调用服务, 并将结果存储在srv中, 返回bool, 正常时返回true
add_turtle.call(srv);
//Twist含有两部分: linear[x, y, z] angular[x, y, z]
//配置向topic:turtle2/cmd_vel发送message
ros::Publisher turtle_vel = node.advertise<geometry_msgs::Twist>("turtle2/cmd_vel", 10);
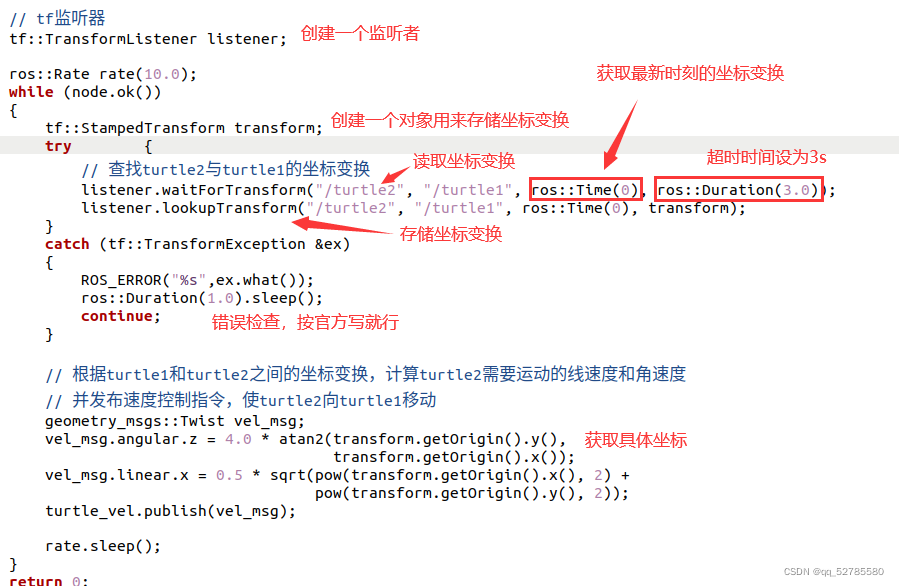
tf::TransformListener listener;
ros::Rate rate(10.0);
while (node.ok()){
tf::StampedTransform transform;
//获取turtle2, turtle1 之间的 transform(从1到2的变换)
try{
listener.lookupTransform("/turtle2", "/turtle1",
ros::Time(0), transform);
}
catch (tf::TransformException &ex) {
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(), transform.getOrigin().x());
vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +
pow(transform.getOrigin().y(), 2));
turtle_vel.publish(vel_msg);
rate.sleep();
}
return 0;
};Optical chassis driver node subscribes to TF and calculates spatial difference. Node drives chassis by publishing cmd_vel.
==============================================================================
My Draft Code:
#include "ros/ros.h"
#include "tf2_ros/transform_listener.h"
#include "tf/tf.h"
#include "geometry_msgs/TransformStamped.h"
#include "geometry_msgs/Twist.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 初始化 ros 节点
ros::init(argc,argv,"optical_driver");
// 创建 ros 句柄
ros::NodeHandle nh;
// 创建 TF 订阅对象
tf2_ros::Buffer buffer;
tf2_ros::TransformListener listener(buffer);
// 处理订阅到的 TF
// 需要创建发布 /optical/cmd_vel 的 publisher 对象
ros::Publisher pub = nh.advertise<geometry_msgs::Twist>("/optical/cmd_vel",1000);
ros::Rate rate(10);
while (ros::ok())
{
try
{
//先获取 frame1 相对 frame2 的坐标信息
// geometry_msgs::TransformStamped tfs = buffer.lookupTransform("ar_marker_153","camera_link",ros::Time(0));
geometry_msgs::TransformStamped tfs = buffer.lookupTransform("marker_153","camera_link",ros::Time(0));
//根据坐标信息生成速度信息 -- geometry_msgs/Twist.h
//quaternion to rpy 逆解链接
geometry_msgs::Twist twist;
tf::Quaternion q(
tfs.transform.rotation.x,
tfs.transform.rotation.y,
tfs.transform.rotation.z,
tfs.transform.rotation.w);
tf::Matrix3x3 m(q);
double roll, pitch, yaw;
m.getRPY(roll, pitch, yaw);
// twist.linear.x = 0.5 * sqrt(pow(tfs.transform.translation.x,2) + pow(tfs.transform.translation.y,2));
// twist.angular.z = 4 * atan2(tfs.transform.translation.y,tfs.transform.translation.x);
twist.linear.x = tfs.transform.translation.x;
twist.linear.y = tfs.transform.translation.y;
twist.linear.z = tfs.transform.translation.z;
twist.angular.x = roll;
twist.angular.y = pitch;
twist.angular.z = yaw;
//5-3.发布速度信息 -- 需要提前创建 publish 对象
pub.publish(twist);
}
catch(const std::exception& e)
{
// std::cerr << e.what() << '\n';
ROS_INFO("错误提示:%s",e.what());
}
rate.sleep();
// 6.spin
ros::spinOnce();
}
return 0;
}
添加至CMakeList
add_executable(ar_chassis_cmd scripts/ar_chassis_cmd.cpp)
add_dependencies(ar_chassis_cmd ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(ar_chassis_cmd
${catkin_LIBRARIES}
)
追加启动
<node name="ar_chassis_cmd" pkg="formal02_ar_marker_tracker" type="ar_chassis_cmd"/> =========================================================== 参考:
=========================================================== Adding EKF might help more?
留言